

2022-09-23 12:03:02深圳市迈坎科技有限公司
系统原理和结构

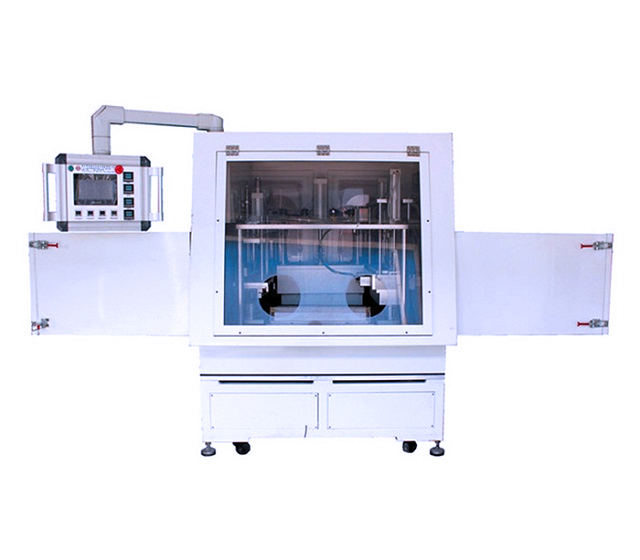
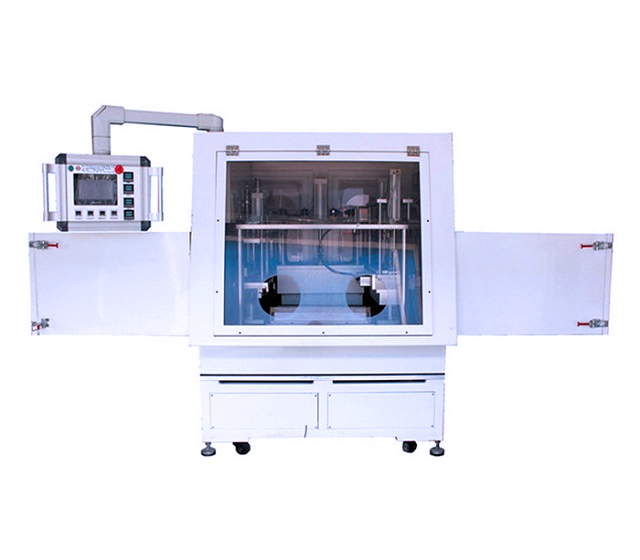
该系统由机械手、CCD、视觉传感器和相应的信号处理单元组成。CCD安装在机械手的末端执行器上形成手眼视觉,CCD采集二维图像进行识别和分配。图像处理主要完成对物体形状的精确描述,包括以下步骤:图像边缘提取和轮廓跟踪。
特征点提取:曲线分割和分割匹配,图形描述和识别。提取出物体图像的边缘后,利用轮廓跟踪细化边缘,去除伪边缘点和噪声点,并对组成封闭曲线的边缘点进行编码,记录每个链码的方向和曲线上各点的X-Y坐标值,便于进一步分析物体的几何特征。
有很好的降噪平滑效果。经过处理后,可以提取物体的一些特征,如物体的质心坐标、面积、曲率、边缘、角点和短轴方向等。根据这些特征信息,可以得到物体形状的基本描述。计算机在图像处理的基础上,推导出视觉信息,然后进行图像匹配和识别,控制机械手按照合适的点胶轨迹点胶。
视觉传感器可以直观地反映物体的外部信息,但单个摄像头只能获得物体的二维图像。虽然立体视觉可以提供三维信息,但很难识别形状相同但深度不同的物体(如有洞和梯子的物体等)。).而且对环境光有一定要求,对光线、物体材质不敏感,结构简单,可以直接获得被测点到传感器的距离等。因此,在使用视觉锂电池注液器时,对工作环境的要求很高,需要在空之间确定机械手末端执行器的位置和姿态,使其能够在合适的位置准确点胶。
深圳市迈坎科技有限公司主要从事电池注液机、大圆柱注液机、软包注液机、小圆柱电池注液机、方形电池注液机等一系列性价比极高的优质产品的研发及销售。
目前,主流的锂电池封装形式主要有三种,即圆柱、...

迈坎科技的技术人员为大家介绍的锂电池使用中常见的误...
如何恢复动力电池设备容量,碱性动力电池设备电解液中...
传统锂电池注液生产中,电池盒注液孔小,只能通过人工...

2009年以前,锂电池注液机还没有实现国产化,大陆封...

半自动在线锂电池注液机是根据其自动化程度而命名的...
智能化制造是当今社会发展的趋势,各行各业都朝智能...

由于气动元件便于控制,维护方便,因此全自动锂电池...
系统原理与结构 系统由机械手、CCD、视觉传感器和相应...

在锂电池注液泵行业人员培养非常重要,在行业竞争情...
—— Contact number




微信二维码
 188 1877 1819
188 1877 1819